


实验简介
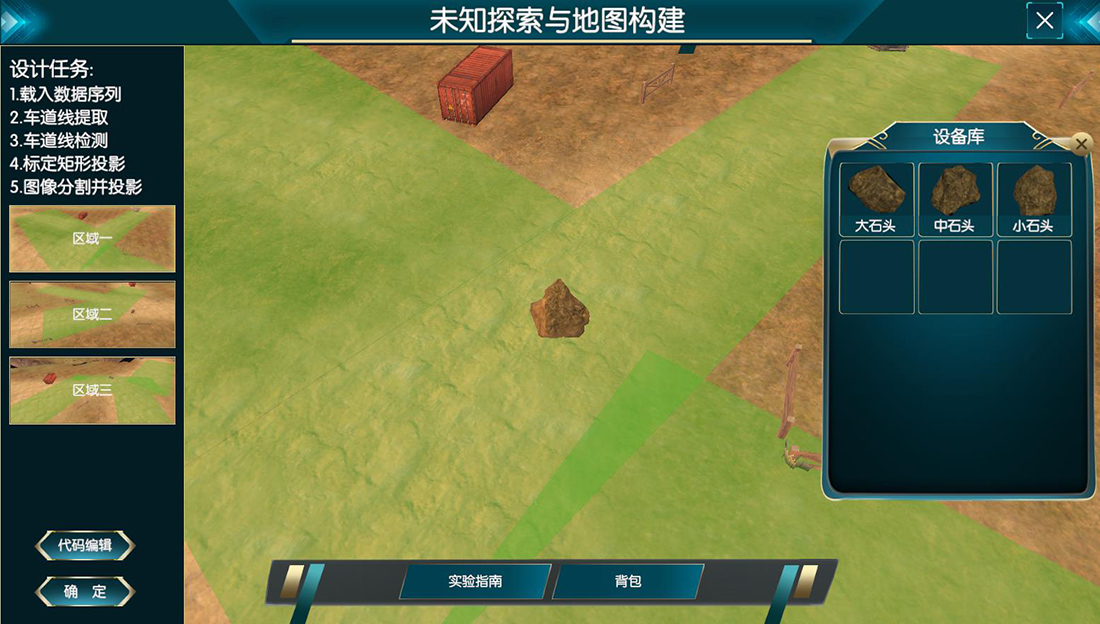
项目采用虚拟仿真形式模拟无人驾驶环境感知及自主规划相关算法的集成验证,实验仿真环境中呈现了实际实验环境中的核心要素与影响因素。实验项目以学生编写算法测试为主线,通过实验能学习和理解从全局到细节的完整知识。能培养学生针对应用场景综合设计解决复杂问题的能力和高级思维,实验一定程度上解决了传统智能机器人理论课程中相关算法抽象化、难以理解、与实践脱离的问题,也克服了无人驾驶实践的代价高昂、难以开展的局限性,从时间、空间、成本、效能多方面延展了传统的实验教学。
设计原则
人驾驶技术是传感器、导航定位、模式识别、智能控制等多门前沿学科的综合体,已成为国防领域的研究热点,对具备实践能力的跨专业人才需求非常迫切。然而,无人驾驶相关的实验教学却面临着风险高、难度高、成本高的严重困难。针对上述问题,团队以相关科研和教学成果为基础,遵照“能实不虚,虚实结合”的原则,为《人工智能与智能机器人》课程自主研发了无人驾驶环境感知与自主规划虚拟仿真实验项目。
首先,坚持以学生为中心的教学理念,实验方案采用了问题导向的设计方法,实验情景吸引力强,有利于调动学生的学习兴趣和积极性。
第二,本实验通过环环相扣的3个实验环节,将知识学习和能力提升有机融合,引导学生通过容错探究式的实验过程得到个性化的实验结果,培养学生解决复杂问题的综合能力和探究式的思维方式。
第三,本实验的挑战度高,实验知识点源于课堂,但实验内容来源于无人驾驶技术领域的前沿,实验仿真程序和模拟数据均来源于科研中的实际程序和实测数据。在实验前,学生需要通过本实验提供的“在线知识角”,对相关领域的知识进行学习。
第四,本实验将志道鼎新融入教学全过程。近年来,无人驾驶成为了中国和美国等军事强国竞相发展的热点。我们把相关学习资料均收录在实验项目的在线“知识角”中。学生通过自主学习,深入理解无人驾驶技术在国防领域的重要价值。然后进一步通过情景体验式的实验教学过程,潜移默化的激发学生投身国防工业的情怀和使命感。
实验目的
通过本实验的学习,促进学生的知识运用、独立思维、团队协作和素质协调发展为目标,注重培养学生良好的科学研究素养和技术应用能力。
(1)培养解放思想、求真务实、积极探索、勇于创新的科学精神;认真、细致、踏实、严谨的工作作风和工匠精神;
(2)了解智能科学的发展趋势和前沿技术;具有针对一个具体智能机器人项目系统的工程实践能力;
(3)能够熟练运用人工智能算法的相关知识,具备设计与实施综合型项目课程设计的能力,并能够对实验结果进行分析,形成实验报告;
(4)具有追求创新的态度和意识,掌握智能科学与技术领域基本的创新方法,能够综合运用所学理论和技术手段根据应用场景进行智能算法的设计、开发和分析。
实验要求
(1)专业与年级要求
计算机科学与技术、智能科学与技术专业本科 2-3 年级学生
(2)基本知识和能力要求
需要预先学习模式识别技术、人工智能与智能机器人、数字图像处理、自动控制技术与应用、传感器技术、机器学习等先导课程。